
GPS Simulation in Proteus 17
In this post I will discuss about the GPS simulation in Proteus. In the previous post I have discussed about the simulation of other commonly used sensors and actuators in Proteus. This post will be oriented around the discussion on the GPS (Global Positioning System) and its simulation in Proteus.
After reading this post the reader will be able to learn about the Global Positioning System (GPS), Global Positioning System module, Arduino interfacing with GPS and the simulation of the Global Positioning System in Proteus. So sit back, keep reading and enjoy learning.
[otw_is sidebar=otw-sidebar-2]
Global Positioning System:
The Global Positioning System is a radio navigation system based on the satellites and that is owned is by the United States of America and operated by the U.S Air Force. The GPS system is the global navigation satellite system that provides the geo-location and time information to the GPS receiver anywhere on or near the earth where there is the unhindered line of sight. GPS signals that are transmitted from the satellite to the GPS receiver are weaken by the mountains and buildings. The GPS system transfers the information about the position of the user and the user cannot transmit any information to the satellite and can only receiver it.
The Global Positioning Satellite is basically the network of thirty satellites that are orbiting around the earth at the distance of 20,000 kilometers. The Global Positioning System can pinpoint your location using the process called Trilateration. The in depth discussion on the GPS is out of the scope of this post however I will discuss it in detail in coming articles. Here I will stick to the GPS module and its simulation in Proteus only.
GPS Module:
[otw_is sidebar=otw-sidebar-3]
Here it is important to note that the GPS system now comes integrated in the commonly used gadgets. For example almost every mobile phone is equipped with GPS system nowadays. In addition the wrist watches also come integrated with GPS technology and also the modern cars have GPS systems embedded in them. All of these are intended for navigation. But besides the application of the GPS technology as the navigation system the GPS technology is also used for other purposes as well.
The GPS system can also be used for fault location in the power system. For example if the fault occurs at any location in the power system the exact location of the fault can be pinpoint using the GPS receiver. It should be noted that besides the GPS technology being integrated in the electronics products and gadgets the GPS receiver also comes in the modular form which can add the functionality to your embedded system or prototypes. The GPS module looks like the one in the following image:
Before diving deep into the discussion on the Arduino interfacing with the GPS module let us first have the brief introduction of the GPS module. As learned in the previous section that the GPS module is the modular system that receives the position of the user from the satellite. Let us have the brief introduction of the pinout of the GPS module.
GPS Module PINOUT:

[otw_is sidebar=otw-sidebar-2]
3V3: This terminal gives the output voltage. That is you can provide the power to any component in your system. This terminal gives the regulated and clean output.
GND: This terminal should be connected to the GND terminal of the power supply.
EN: This pin will enable or disable the GPS module. When pulled down this pin will turn off the GPS module.
Vin: This pin is connected to the power supply. You can use voltage from 3V3 to 5 volts.
Vbat: Vbat is an input pin. This terminal of the GPS module is connected to the battery backup.
Tx: This pin is the transmit pin of the GPS module. With the help of this pin the GPS module delivers the data to the microcontroller
Rx: With the help of this pin you can receive the data from the microcontroller to the GPS module.
FIX: This pin is the output pin.
PPS: This pin is the Output pin.
Arduino and GPS simulation in Proteus:
[otw_is sidebar=otw-sidebar-3]
In this section I will discuss about the simulation of the Arduino and GPS system in the Proteus. It is important to mention here that it always beneficial to simulate the behavior of the circuit before actually implementing it. By simulating the behavior of the circuit before actually developing its hardware the designer can look for the glitches in the coding and the error in the circuit. Thus the simulation can save both time and money. It is important here to note that if you want to simulate the behavior of any circuit it is important that the simulation models of all the components that are being used to design the circuit should be present in the library of the software. Of the simulation model of any component is not present in the library of the software the software will be unable to simulate the behavior of the circuit. So it is important that the simulation models of all the components should be available in the library of the Proteus. The simulation model of the GPS module is not present in the library of the Proteus. So before simulating it is important that the simulation model of the GPS should be installed in the library of the Proteus. Let us now see the process step by step. Here I am assuming that you have already downloaded and installed the files containing the simulation models of the GPS module.
Step1:
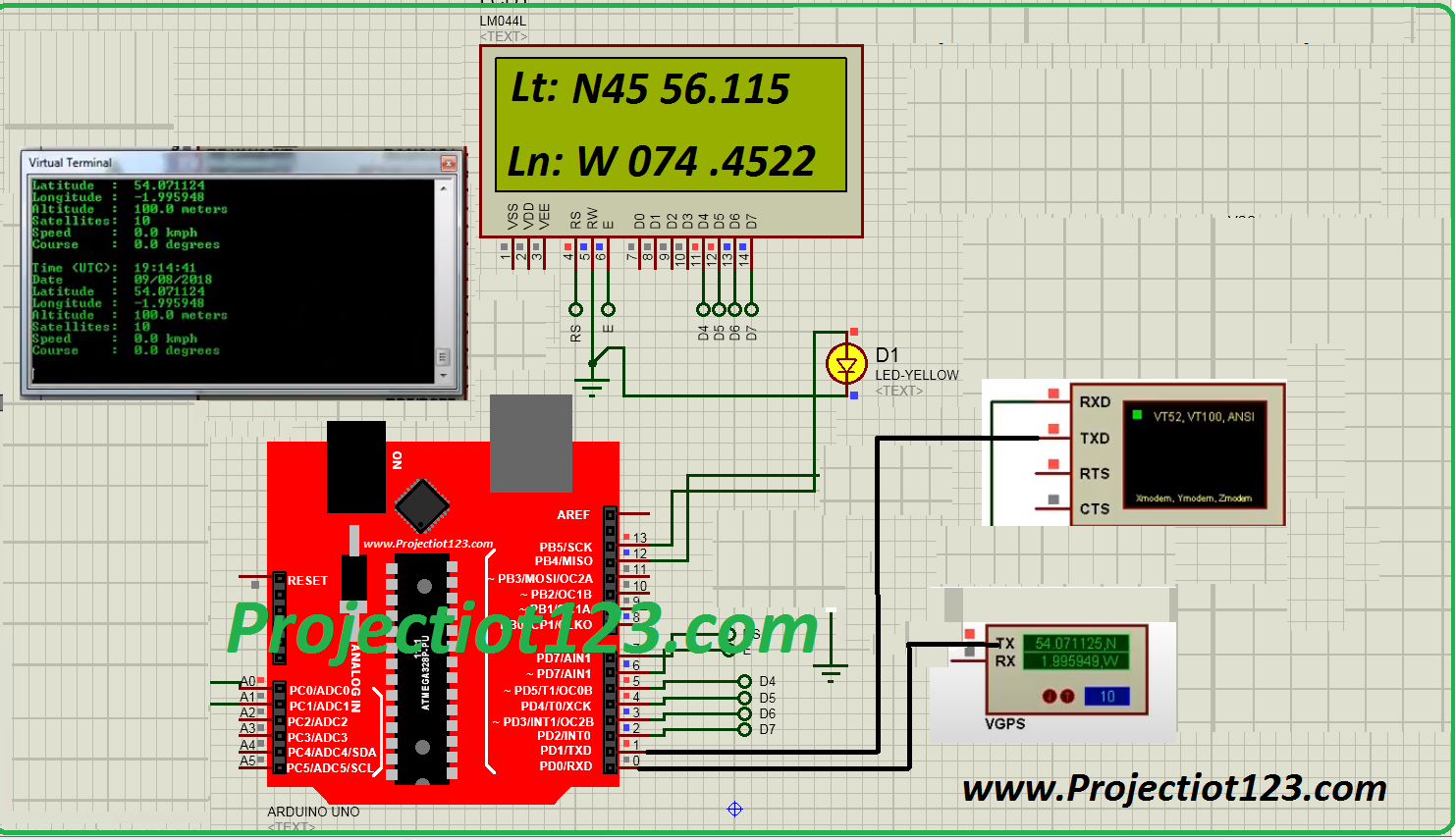
First of all place all the components in the workspace of the Proteus as shown in the following image:
Step2:
Now connect the circuit as shown in the following figure:
The circuit is quite straightforward.
Step3:
Now attach the simulation model HEX file to the GPS symbol in the workspace of the Proteus as shown in the following below:
The pop up window as shown in the above figure appears by double clicking the symbol of the GPS.
Step4:
Now write the code of the Arduino and attach the HEX file of the Arduino code to the Arduino in Proteus as shown in the following figure:
That is all for now. I hope this post would be helpful for you. In the next post I will come up with more interesting applications of the Proteus and more interesting topics of the engineering. Till then stay connected, keep reading and enjoy learning
Wow, incredible weblog structure! How long have you been blogging for?
you made blogging look easy. The total glance of your site is
excellent, as smartly as the content! You can see similar here sklep internetowy
Hello! I could have sworn I’ve been to this blog before but after browsing through some
of the post I realized it’s new to me. Anyhow, I’m definitely happy I found it
and I’ll be book-marking and checking back often!
Here is my homepage vpn coupon 2024
Good day! Do you know if they make any plugins to assist with Search Engine Optimization?
I’m trying to get my blog to rank for some targeted keywords but I’m not seeing very good success.
If you know of any please share. Cheers! I saw similar article
here: Scrapebox List
Awsome post and right to the point. I don’t know if this is really the best place to ask but do you guys have any thoughts on where to hire some professional writers? Thanks in advance 🙂
Hey! Do you know if they make any plugins to help with Search
Engine Optimization? I’m trying to get my website to rank for some targeted keywords but I’m
not seeing very good results. If you know of any please share.
Thanks! I saw similar text here: GSA Verified List
You ought to take part in a contest for one of the most useful websites online.
I am going to recommend this blog!
My page; vpn code 2024
Some really great info , Glad I noticed this.
Great article.
Here is my web page … vpn special coupon
Hello my loved one! I want to say that this post is awesome, great written and include approximately all important infos. I would like to look more posts like this .
Hey there! Do you use Twitter? I’d like to follow you if that would be okay. I’m undoubtedly enjoying your blog and look forward to new updates.
An interesting dialogue is price comment. I feel that you must write more on this matter, it may not be a taboo topic but usually people are not sufficient to talk on such topics. To the next. Cheers
Great items from you, man. I have bear in mind your stuff previous to and you’re just too great. I really like what you have obtained right here, really like what you are stating and the way in which you say it. You make it entertaining and you still take care of to keep it wise. I can’t wait to read much more from you. This is really a tremendous site.
Very superb visual appeal on this web site, I’d rate it 10 10.
Howdy! Would you mind if I share your blog with my twitter group? There’s a lot of people that I think would really appreciate your content. Please let me know. Thanks
india pharmacy http://indiaph24.store/# indian pharmacy paypal
reputable indian online pharmacy
mexico drug stores pharmacies cheapest mexico drugs mexican drugstore online
Thank you for another informative web site. Where else could I get that kind of info written in such a perfect way? I’ve a project that I am just now working on, and I have been on the look out for such info.