
Digital Tachometer Using 8051 Microcontroller 9
[otw_is sidebar=otw-sidebar-1]Hello Fellows! In this tutorial, we build a simple Digital Tachometer interfacing with 8051 Microcontroller, which can calculate the speed with a precise value. Let’s begin.
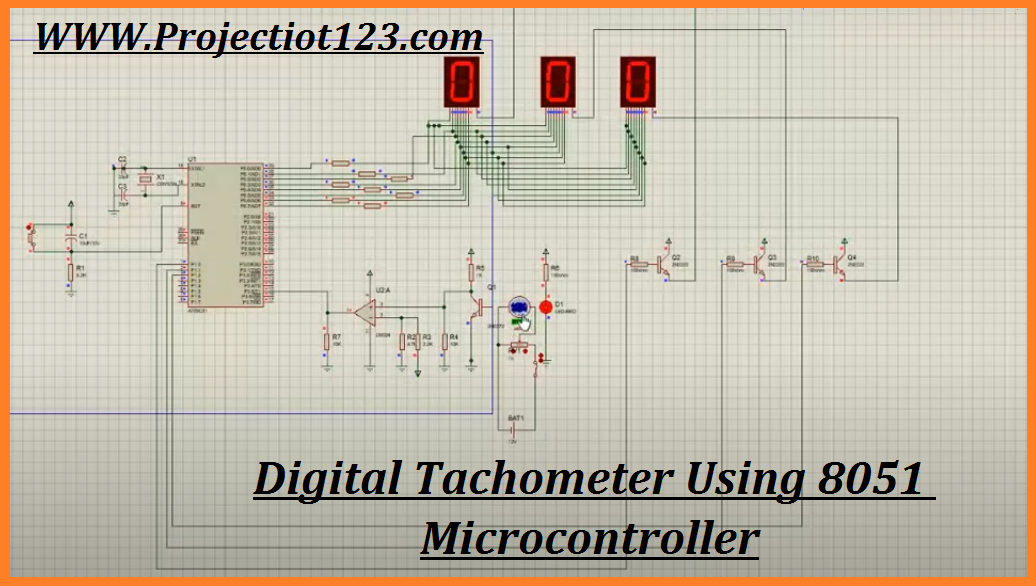
Digital Tachometer Using 8051 Microcontroller
A Tachometer is a component which calculates the speed of a revolving object like an electric motor. Speed of an electric motor is set on by the number of rotation made by the motor in 1 minute. We can say that, speed is calculates in RPM. It can be mechanical device with a hot gear and spindle ranging or an electrical component which transform the angular speed into electrical signal. The electrical tachometer has ability to turn an AC tachometer or a DC tachometer.
While a standard tachometer is a contact tachometer, which can made incorrect results due to change in contact parameters. It works on the principle of retro reflective scanning, wherein a light source component like LED transmits light signal to the retro reflective target component which reflects the light, which is in turn received by the light tracked.
Principle of Circuit
The principle behind the Digital Tachometer requires a simple implant system with a sensor, a controller and an actuator. The sensor utilized here is Infrared transmitter receiver pair, the controller utilized is the 8051 Microcontroller loaded with a assemble code and the actuator is a display component, for showing the speed of the motor.
The sensor feels the speed of the motor without actually being in contact with it by the principle of light transmission and reflection and gives a signal. This signal is transform into an electric signal and satisfied to the microcontroller, which is programmed to measure the speed in terms of number of motor rotating in 1 minute. This speed is showed on the seven segment display.
Components Needed
Microcontroller
7 Segment display
NPN Transistor
Resistor
Potentiometer
Motor
Photo Diode
Circuit Design
The photo diode is attached in reverse bias. The negative side of cathode is attached to 5v supply and the positive side of anode is attached to ground through a current resistor of 10k. Microcontroller reset contain of a push button, a resistor and a capacitor that the voltage at the reset pin does not falls below 1.2v and the timing constant is never less than 100ms. Here, we choice a 10k ohms resistor and 10 microfarad capacitor. The Segment inputs of seven Segment i.e. A, B, C, D, E, F, G and D Pins are attached to PORT0 through single 100 ohms resistors.
Working
When the IR sensor gets power, the IR transmitter starts releasing IR rays. A motor is set in front of the IR sensor.
As the motor shaft revolves such that the white spots come in contact with the sensor, the IR rays are throwing back by the dot and falls on the IR receiver. The photo diode, which is utilized as the IR receiver, starts managing whenever the IR rays are reflected.
After that, the output of the IR sensor is given to the comparator also the output of the comparator is high once the IR rays area unit throws back and also the output of the comparator is low once there aren’t any reflections. Therefore, the output of the comparator is in the formation of an ON-OFF pulse.
This pulse is will sends to the microcontroller as a timer input and the microcontroller is programmed to measures the number of times the motor revolve in a second.
The speed of the motor is measured by multiplying the value of final count by 60 to get the speed in rotations per minute. This value is then showed on the seven segment display.
Applications
1. The Digital Tachometer circuit can be used to measure the speed of revolving wheels, discs and motor shafts.
2. This circuit can be utilized at homes to check speed of small battery, fans and other motor based component.
3. This circuit can be utilized at places where direct contact with motor shafts and in case of vehicles and also in industrial machines.
So this is often it. I hope you think about this guide helpful. Can meets you guys next time. Until then lookout, have additional fun.
Wow, incredible blog format! How long have you been running a blog for?
you make running a blog look easy. The full look
of your web site is magnificent, as neatly as the content!
You can see similar here najlepszy sklep
When someone writes an post he/she maintains the idea of a user in his/her brain that
how a user can know it. Therefore that’s why this
piece of writing is great. Thanks! I saw similar here: Sklep online
Hello! Do you know if they make any plugins to assist
with Search Engine Optimization? I’m trying to get my blog to rank for some targeted keywords but
I’m not seeing very good success. If you know of any please share.
Thanks! You can read similar article here: E-commerce
It’s very interesting! If you need help, look here: ARA Agency
Hi! Do you know if they make any plugins to help with Search
Engine Optimization? I’m trying to get my website to rank for some targeted keywords but I’m not seeing very good results.
If you know of any please share. Many thanks!
You can read similar article here: Scrapebox AA List
Touche. Sound arguments. Keep up the good spirit.
Look into my page … vpn coupon code 2024
constantly i used to read smaller content that
as well clear their motive, and that is also happening with this article which I am reading here.
Feel free to visit my page: vpn special code
Hello! Do you know if they make any plugins to assist with SEO?
I’m trying to get my website to rank for some
targeted keywords but I’m not seeing very good gains.
If you know of any please share. Cheers! I saw similar blog here: GSA Verified List
Marvelous, what a webpage it is! This weblog presents useful information to
us, keep it up.
My page: vpn coupon code 2024