

Hand Gesture Controlled Robot Using Arduino and mpu6050 Leave a comment
In this project, we’ve got designed a Hand Gesture Controlled Robot Using Arduino and mpu6050. This Hand Gesture Controlled automation relies on Arduino, MPU6050, RF Transmitter-Receiver combine and Motor Driver.
Hand Gesture Controlled Robot Using Arduino and mpu6050
[otw_is sidebar=otw-sidebar-1]
Automation is Associate in nursing electro-mechanical system that’s operated by a computer virus. Robots may be autonomous or semi-autonomous. Associate in nursing autonomous automation isn’t controlled by human and acts on its own call by sensing its surroundings. Majority of the economic robots square calculates autonomous as they’re needed to control at high speed and with nice accuracy. However some applications need semi-autonomous or human controlled robots. One of the often enforced motion controlled automation could be Hand Gesture Controlled automation. During this project, hand gesture controlled automation is developed mistreatment MPU6050 that could be measuring instrument and 3-axis gyro device and also the controller half is Arduino. Instead of employing a remote with buttons or a joystick, the gestures of the hand square measure won’t to management the motion of the automation. The project depends on wireless communication, where the data from the hand gestures is transmitted to the automation over RF link.
 Principle of hand gesture Robot
Principle of hand gesture Robot
In order to know the principle of operation of Hand Gesture Controlled automation, allow us to divide the project into 3 elements. The first half is obtaining knowledge from the MPU6050 measuring instrument Gyro device by the Arduino. The Arduino endlessly acquires knowledge from the MPU6050 and supported the predefined parameters; it sends information to the RF Transmitter. The RF Transmitter, upon receiving knowledge from Arduino, transmits it through the RF Communication to the RF Receiver. Finally, the second a part of the project is coding the information received by the RF Receiver and causation applicable signals to the Motor Driver IC, which can activate the Wheel Motors of the automation.
Components Required:
Arduino
RF Transmitter
Encoder IC
Gyroscope device
Resistor
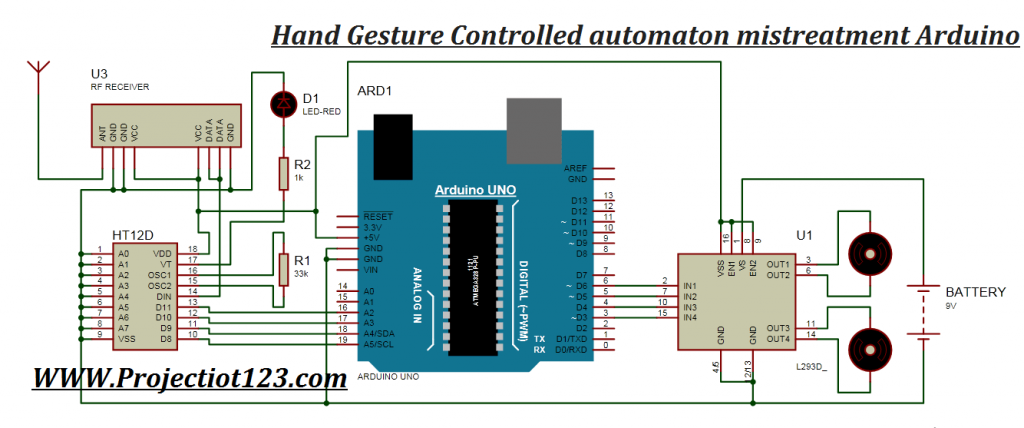
Circuit Design:
The transmitter section of the automation consists of Arduino, MPU6050 device, Encoder IC Associate in Nursing an RF Transmitter. The communication between Arduino and MPU6050 device takes place through I2C Interface. Hence, the SCL and SDA pins of the MPU6050 device square measure connected to A5 and A4 pins of the Arduino. Additionally, we are going to be mistreatment the interrupt pin of the MPU6050 and therefore, it’s connected to D2 of Arduino. Encoder has 12-bit parallel knowledge to serial knowledge. The 12-bit knowledge is split into address and knowledge bits. These pins are connected to ground. During this circuit, pin one to pin nine of HT-12E square measure connected to ground. Pins ten to thirteen square measure the information pins of HT-12E. They receive the four word parallel knowledge from external supply sort of an Arduino. They’re connected to the pins D12, D11, D10 and D9 of Arduino severally. The information of transmitted is low. Hence, Pin fourteen is additionally connected to ground. Dout is that the serial knowledge out pin. It’s connected to the information in pin of the RF Transmitter. Hence, all the VCC pins square measure connected to a regulated 5v provide.
Working:
In this project, a mobile automation that’s controlled by the gestures created by the hand is intended. The operating of the automation is explained here. As mentioned earlier, the gesture controlled automation could be a wireless operated automation. Once the automation is battery-powered on, the transmitter half, that consists of Arduino, MPU6050, Encoder and RF Transmitter, can endlessly monitors the MPU6050 device. This knowledge is captured by the Arduino, that then transmits a corresponding knowledge to the Encoder, supported the orientation of the MPU6050 device. The parallel knowledge received by the encoder is regenerate into serial knowledge and this serial knowledge is transmitted by the RF Transmitter. The Decoder can convert the serial knowledge to parallel knowledge and this parallel knowledge is given to the motor driver. Supported the information, the movement of the motors, and therefore the movement of the automation is outlined.
Application:
- Wireless controlled robots square measure terribly helpful in several applications like remote police investigation, military etc.
- Hand gesture controlled automation may be utilized by physically challenged in wheelchairs.
- Hand gesture controlled industrial grade robotic arms may be developed.
I hope you’re thinking that concerning this guide useful. Will meets you guys next time. Till then lookout, have any fun.
Hand Gesture Controlled Robot Using Arduino and mpu6050